Twinstar 2 (Multiplex)

Nach dem Querruder-Einstiegstraining an der Trojan sollte es die Twinstar sein, von der viele begeistert sind.
Auf das Teil war ich gespannt: mein erster Flieger von Multiplex. Die Bausätze werden immer so gelobt. Und ja, tatsächlich, der Aufbau war gut beschrieben und schlüssig; die (Damen?) und Herren in der Entwicklungsabteilung haben gute Arbeit geleistet. Einzig die Buchsen für den Stromanschluss für die Tragflächen ist so schwergängig, dass ich ihn nicht verwenden konnte. Ich habe auf XT-60-Stromstecker (die gehen schwer genug) und für die Servos, LED etc. Multiplex-Steckverbinder umgebaut - das bewährt sich.
Ausgesprochen gut ist die Tragflächen-Befestigung gelöst: Diese werden über eine Plastik-Klammer festgeschraubt. Bei einer Bruchlandung brechen die Klammer, nachdem sie dazu ordentlich Energie aufgenommen haben, und die Tragflächen fallen ab. Meine Twinstar hat dadurch schon einige schwere Einschläge verkraftet - nur die Klammern müssen dann getauscht werden.
Um bald fliegen zu können, habe ich zunächst die mitgelieferten Bürstenmotoren verwendet, aber bei nächster Gelegenheit auf Brushless umgerüstet (D2826-10 1400kv mit 7x10-Propeller und TURNIGY Plush 30amp Speed Controller an 3S-Akku.
Für die Motoren habe ich die Original-Plastikhalterung genommen. Die Motorplatte wurde aber gegen ein Alu-Blech getauscht. Und die Plastik-Teile wurden so weit gekürzt, dass die Motoren in den Gondeln versenkt werden können. (Eine passende Motorhalterung aus Alu gibt es auch bei ebay, aber ich war zu geizig.)
Mit den brushless-Motoren fliegt die Kiste wunderbar; auch der Sound ist nicht zu verachten. Senkrecht nach oben geht zwar noch nicht richtig, aber so viel Leistung hatte ich vorher noch nicht. Beim Start sollte man zwar mit Vollgas gut anschieben, aber dann fliegt die Kiste sofort gut.
Leider ist es eng im Rumpf. Man sollte wirklich vor dem Zusammenkleben genau überlegen, wo man was unterbringen will und wie man herankommt. Unter den Flügeln ist nur noch der Empfänger. (Das Kabelchaos ist wegen der Strom- und Steuerkabel für die Flügel noch groß genug.) Alles andere befindet sich im Hohlraum dahinter.

XT-60-Verbinder für die Regler und MPX-Verbinder für die Flächenservos und Positionslampen. Ganz unten der Empfänger (AR8000)
Um den Hohlraum zugänglich zu machen, habe ich eine Klappe angebracht. Das ist eine graue Plastikschachtel von Conrad ("Universal-Gehäuse ABS Grau 100 x 51 x 25").

Originale Schachtel.
Der Deckel wird mit Magneten befestigt. Der Boden ist abgesägt, so dass man an den Hohlraum im Rumf herankommt. An den Seiten ist die Schachtel im Rumpf eingeklebt (Belizel). Das Loch ist nun schön groß.

Unterseite, Hohlraum geöffnet. An den Stirnseiten sind die Magnete eingeklebt; der Deckel steht unten.
Ganz links der Satellit, rechts oben der Antennenstummel des AR8000-Empfängers
Der Hohlraum ist gut gefüllt: Telemetriesender (TM8000, Antenne innenliegend in einem dicken Strohalm, so dass ich den Sender tauschen kann), Stabilisierung (OrangeRX RX3S), Spektrum-Geschwindigkeitssensor (Staurohr), Mini-OSD zur Spannungsüberwachung für FPV und inzwischen einen UBEC.

Im Vordergrund die Mini-OSD-Elektronik (zum Einblenden der Spannung in das FPV-Video), orange die Flugstabilisierung. Verschärft wird die Kabelei durch 5V- und 12V-Spannungen (letztere für FPV).
Für FPV habe ich bei GlobeFlight eine GoPro-Halterung gekauft (inklusive des Hitec 5245 MG 180°-Servos. Letzteres war zwar kein Schnäppchen, aber ich habe (noch) keine Ahnung und wollte keinen Stress.
Die Halterung muss noch verklebt werden, am besten mit Epoxid-Harz. Um der GoPro keine Kratzer zuzufügen, habe ich die Halterung mit ein paar Filzstückchen ausgeklebt. Video-Out-Kabel für die GoPro gibt es preiswert bei HobbyKing.
GoPro-Halterung von Globe-Flight. Für die Höhenbewegung braucht man einen Metallgetriebe-Servo.
Nervig war anfänglich die Stripperei für die Pan/Tilt-Halterung. Ich habe im Rumpf die Kabel aber jetzt fest verlegt. Sie enden an einem MPX-Stecker. Die Kabel an der Halterung habe ich auch auf einer MPX-Buchse zusammengefasst. Nun ist die Verbindung schnell und sicher hergestellt.

An der Seite ist der MPX-Stecker zu sehen. Damit ist die gesamte Einheit blitzschnell angeschlossen.
Rechts das Staurohr des Geschwindigkeitsmessers (Spektrum-Telemetrie).
Den FPV-Sender habe ich übrigens oben hinter den Tragflächen (über dem Elektronik-Hohlraum) angeordnet. Er sollte möglichst weit von den Empfänger-Antennen entfernt sein (die Hauptantenne zeigt nach unten, der Satellit ist hinten unten angebracht; die Antennen zeigen nach beiden Seiten heraus.
Lande-/Bremsklappen (05/2014)
Neueste Kreation sind Lande-/Bremsklappen. Mit voller FPV-Bestückung ist die Twinstar schon etwas schwer. Sie kommt bei der Landung ganz schön hereingeschossen. Die weit nach unten ausstellbaren Spaltklappen bremsen gut und geben Auftrieb. Ich habe FunCub-Scharniere benutzt. Auf Grund ihrer Geometrie ergeben sie einen schönen Spalt.
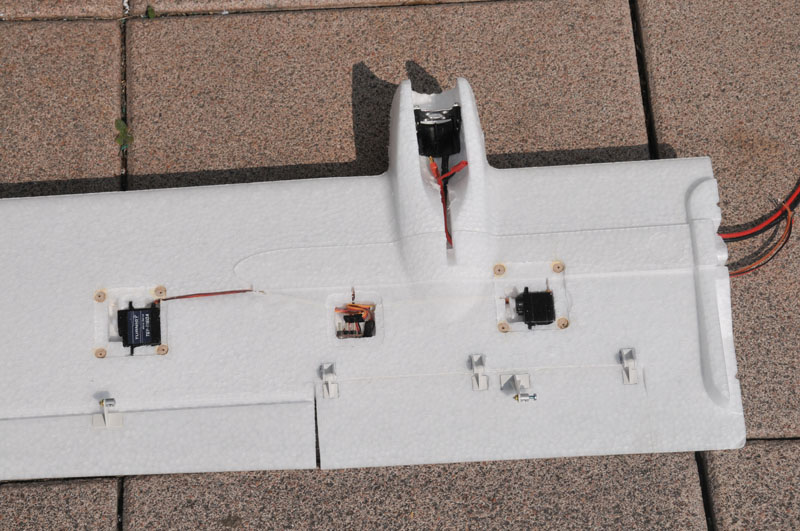
In der Mitte ein Fach für den Stromverteiler. Die BECs der Motorregler versorgen nur noch Beleuchtung und Flächenservos, für den Rest habe ich einen UBEC.
Und wie alle anderen Flächenservos habe ich Servoabdeckungen verwendet. Wenn ich die Flächen staple, drücken sich gern die Servo-Hörner mitsamt der Drähte in die aufliegende Fläche.
Damit die Abdeckungen sauber eingepasst sind, fräse ich die Fläche an der Auflagestelle ca. 1,5mm ein (ggf. muss das Servo um denselben Betrag versenkt werden. An den Schraublöchern werden zuerst Buchenholz-Stücken eingesetzt (geklebt mit Belizel, Uhu-Por oder Heißkleber) danach werden die Löcher passgenau (indem man die Abdeckhaube auflegt) gebohrt. Bewährt sich inzwischen bestens.
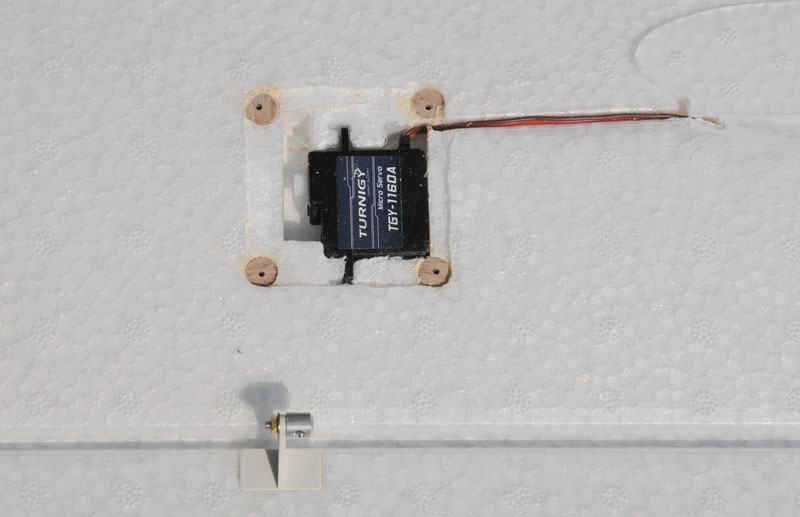
Eingeklebte Buchenholz-Stückchen, an die die Servoabdeckungen angeschraubt werden.
Wie oben schon erwähnt, speisen die BECs der Motorregler nur noch die beiden Servos der Fläche und die Positionslichter. Ich hatte mal einen Absturz, den ich auf fehlende Spannung und Empfänger-Reboot schiebe. Den Elektronik und die Rumpf-Servos versorge ich nun unabhängig mit einem UBEC (der muss ggf. auch die FPV-Servos versorgen).
Beleuchtung (06/2014)
Die unzureichende Beleuchtung des verwendeten Sets ärgerte mich schon lange. Meine Hoffnung, damit auch beim Eintritt der Dämmerung fliegen zu können, erfüllte sich nicht. Es blinkt zwar schön (zumindest bei den Antikollisionslichtern), aber man sieht das nur am Boden. Die Abstrahlwinkel aller LEDs sind viel zu gering (ca. 10°). Die Positionslichter, das Wichtigste überhaupt, sind nur manchmal kurz zu sehen. Sie sollten eigentlich in einem Winkel von 113° strahlen. Auch das Hecklicht sollte 130° abstrahlen.
Deshalb habe ich 1W-LEDs gekauft. Die strahlen mit 120° ab - das ist schon mal nicht schlecht. Und sie sind richtig hell. Zugelassen sind sie für 350mA, aber bereits bei 100mA strahlen sie hell genug.
Weil die LEDs gekühlt werden sollen (zumindest bei 350mA), habe ich sie auf Alu-Bleche geklebt (Epoxydharz). Diese dienen gleichzeitig als Reflektoren und verhindern, dass die LED in die Fläche hineinstrahlt (sieht dann nicht mehr so "scalemäßig" aus).
Im ersten Versuch habe ich selbstgemixten Wärmeleitkleber verwendet (also viele Aluspäne in das Epoxydharz eingemixt - man braucht ja nur einen Tropfen davon). Beim nächstenmal würde ich aber Wärmeleitpaste (für die Kühlkörper von Computerprozessoren - die ist ganz billig) verwenden und zwischen LED und Blech schmieren. Die LED würde ich dann an Rand ankleben. Mit einer Nadel kann man das Epoxydharz sehr gut am Rand applizieren.

LED auf Alublech geklebt. Dieses wird dann in die Aussparung der Flügelecke eingeklebt (Mucilage). Und anschließend wird die Ecke mit einer Abdeckkappe verschlossen.
Nach den gut sichtbaren Positionslichtern muss nun noch ein Hecklicht gebaut werden, damit ich den Flieger auch von hinten gut sehe. Passende Abdeckkappen hatte ich noch von der Tiefziehaktion übrig. Weil die Kappen zu klein sind, um die ganze LED aufzunehmen, brauchte ich noch ein paar Abstandhalter. Zuunterst liegt ein Alublech, auf das die LED geklebt wird und das etwas Wärme aufnehmen kann.

Schematischer Aufbau der Schichten
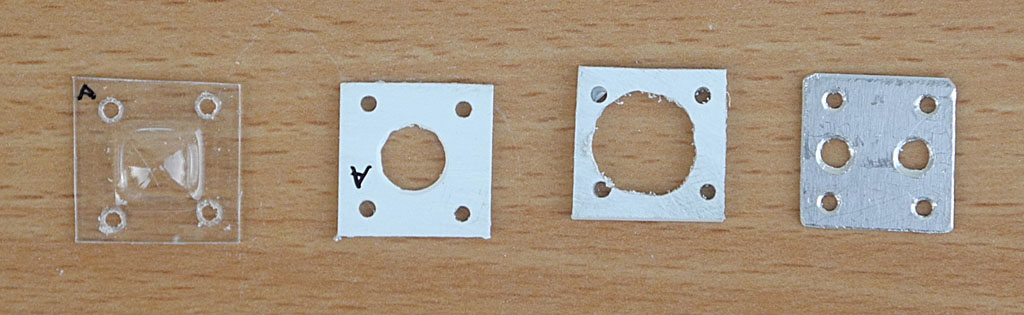
Einzelteile Abdeckkappe, Blende, Abstandshalter, Alu-Kühlblech
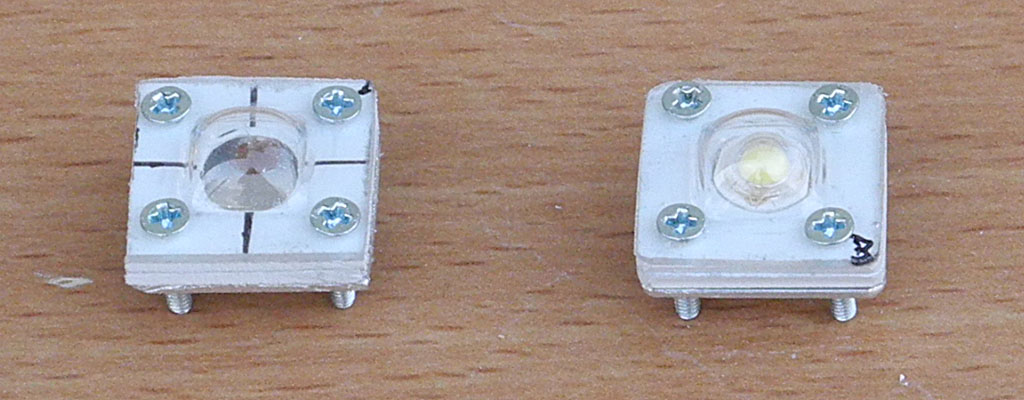
fertige Module; rechts mit LED bestückt.

Eingebautes Hecklicht.

Selbst, wenn es heller ist, sind die Positionslichter gut zu sehen.
Anti-Kollisionsblitzer (07/2014)
Was eigentlich auch noch fehlt, sind die Anti-Kollisionsblitzer. Nach einigen Recherchen habe ich bei LEDs-And-More ein preiswertes "2 Kanal Universal Blitzer Modul" für 12,-EUR gefunden. Mit diesem kann man LEDs bis 500mA betreiben an einer Eingangsspannung von 7-24V betreiben.
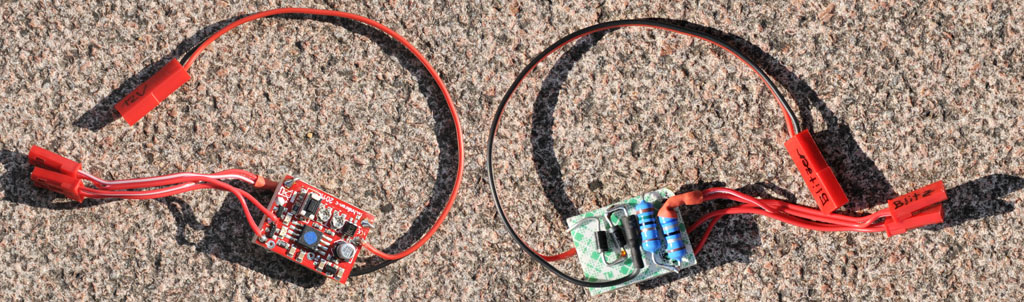
Vorder- und Rückseite des Blitzermoduls. Die Anschlussstifte habe ich gegen flexiblere Kabel getauscht.
Auf der Rückseite befinden sich die Vorwiderstände.
Wegen der min. Eingangsspannung von 7V des Moduls kann ich die Blitzer nicht an 5V betreiben, es muss also direkt an den Akuu. Der Vorwiderstand für die Blitzer-LEDs ist also der Spannung von max 12,6V anzupassen.
Ich verwende 1W-LEDs; die sind eigentlich tierisch hell und sollten reichen. Statt mit den zugelassenen 350mA will ich sie mit 300mA betreiben. Eine Kühlung sollte für die kurzen Blitze nicht erforderlich sein.
Der Vorwiderstand für die LED berechnet sich wie folgt:
R=U/I=(12,6V [max. Akku] - 3,5V [Flussspannung LED] - 0,7V [Spann.abfall des Blitzer-Moduls]) / 0,3A = 8,4V / 0,3A = 28 Ohm
Kritisch ist die Leistung wegen der hohen Spannung von 8,4V, die über dem Widerstand abfallen muss
P = U * I = 8,4V * 0,3A = 2,5W.
Um die Widerstandsleistung zu vermindern, habe ich 4 Dioden in Reihe mit der LED geschalten. Über jeder fällt 0,7V ab, so dass sich die Spannung um 2,8V reduziert:
P = U * I = 8,4V - 2,8V * 0,3A = 1,7W.
Ist immer noch viel, aber schon besser. Mit einem 1W-Widerstand sollte bei der kurzen Belastung durch das Blitzen eigentlich nichts passieren.
Zum Einbau habe ich eine vereinfachte Art des Hecklichtes gewählt. Auf die Abstandshalter-Schicht wurde verzichtet. Die LED wird mit den Schrauben auf das Alu-Blech geklemmt. Dadurch brauche ich die LED nicht mal anzukleben. Das Alu-Blech habe ich mit 2mm etwas dicker gewählt, so dass ich gleich Gewinde für die M2-Schrauben hineingeschnitten habe. Damit die Schrauben sich nicht lockern, habe ich etwas Schraubensicherungslack verwendet.

Links das zusammengeschraubte LED-Modul (noch ohne LED), rechts die Einzelteile.

Eingepasstes Blitzermodul auf der Unterseite der Twinstar.
Aufpowern mit 3-Blatt-Propellern
Mitr FPV-Ausrüstung wird die Twinstar doch etwas schwerfällig, deshalb wollte ich mehr Schub. Aus einem Kopter-Propellerset habe ich zwei gegenläufige 7x4,5-3Blatt-Propeller angebaut. Der Schub ist gewaltig, senkrechtes Aufsteigen ist kein Problem (wenn auch nicht ganz "scale"). Durch die gegenläufigen Propeller gibt es keinen seitlichen Zug.
Der Strombedarf ist natürlich auch nicht schlecht. Um den Strom im Flug zu messen, habe ich habe den Spektrum-Kapazitätssensor eingebaut. Bei einer Messung im Stand mit einem geleertem 3S-Akku habe ich 32A bei 10V Spannung unter Last gemessen. Viel mehr sollte ich den Motoren allerdings auch nicht zumuten; sie sind bis max. 21A ausgelegt.

Gegenläufige 3-Blatt-Propeller gibt es Dank des Kopter-Hype in vielen Ausführungen. Der Schub reicht zum senkrechten Steigen